


技術(shù)文章
技術(shù)文章
LabJack 數(shù)據(jù)采集卡可用于控制各種類型的電機(jī),包括步進(jìn)電機(jī)和PID 控制器
LabJack 設(shè)備可用于控制各種類型的電機(jī),包括步進(jìn)電機(jī)和PID 控制器。此外,LabJack 設(shè)備可以輸出 PWM 信號,用于精確的占空比控制、電壓調(diào)節(jié)和電機(jī)速度控制,以在低速時(shí)實(shí)現(xiàn)最大扭矩。 www.dhqcn.com
將步進(jìn)電機(jī)連接到 T 系列 LabJack數(shù)據(jù)采集卡的方法
設(shè)備
要使用 LabJack 成功連接和操作步進(jìn)電機(jī),您需要以下材料:
帶 USB、以太網(wǎng)或 WiFi 的計(jì)算機(jī)
LabJack T4 或 T7
PS12DC - 電源開關(guān)板
單極步進(jìn)電機(jī)
PS12DC 每通道可處理高達(dá) 28V 的 750mA 電流,因此大多數(shù) NEMA17 單極步進(jìn)電機(jī)都可以工作。始終使用 PS12DC 數(shù)據(jù)表驗(yàn)證電機(jī)額定值。
雙極電機(jī)將無法工作,因?yàn)樗鼈冃枰?2 組 H 橋,而 PS12DC 只是一個(gè)高側(cè)開關(guān)器件,因?yàn)樗褂?P 溝道 MOSFET。
電源
這里我們將使用 12VDC,但任何不超過 PS12DC 額定值的都可以
連接線
基本連接
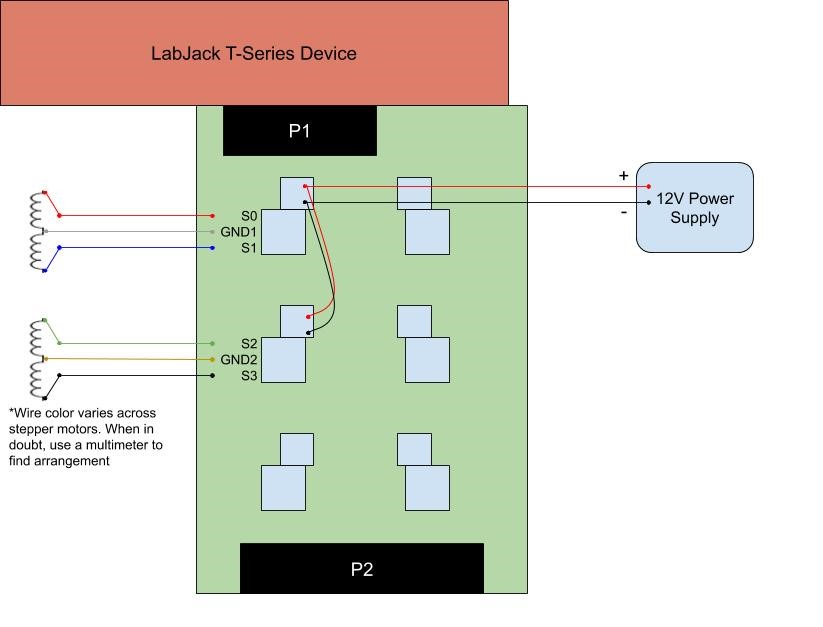
首先按照PS12DC 數(shù)據(jù)表中的說明將 PS12DC 連接到您的 LabJack 。如上所述,一個(gè)普通的兩相單極步進(jìn)電機(jī)應(yīng)該總共有六個(gè)引線,每個(gè)相位有兩個(gè)線圈端和中心抽頭。將其中一相的兩個(gè)線圈端連接到 PS12DC 上的 S0 和 S1,并將線圈的中心抽頭連接到 GND1。同理,將另一相的兩個(gè)線圈端接S2、S3,接第二相的中心抽頭GND2。然后,將 VS1 連接到 VS2,將 GND1 連接到 GND2。最后,VS1接12V電源正極,GND1接12V電源負(fù)極。
筆記:可以使用位于 PS12DC 同一塊中的任何一對 S 通道并具有相同的操作。默認(rèn)的 LUA 腳本 unipolar_full_step.lua 和 unipolar_half_step.lua 使用 S0+S1 和 S4+S5 作為 I/O 通道,所以在加載和使用它之前確保用您的應(yīng)用程序特定的 S 通道更新 LUA 腳本。
PS12DC 的每個(gè) S 通道對應(yīng)一條 LabJack 數(shù)字 I/O 線。通過將給定 S 通道的相應(yīng) I/O 線設(shè)置為高電平,來自電源的 12V 將被引導(dǎo)通過該 S 通道。因此,用戶可以通過簡單的 I/O 線路切換,以編程方式選擇何時(shí)為每個(gè)線圈端完全通電。S0:S7 對應(yīng) EIO0:EIO7,S8:S11 對應(yīng) CIO0:CIO3。
識別線索
萬用表可用于將每相的引線識別為線圈端或中心抽頭。一種方法是測量不同導(dǎo)線對之間的電阻。兩個(gè)線圈端引線之間的電阻應(yīng)是線圈端引線與中心抽頭引線之間電阻的兩倍。通過測試幾對引線之間的電阻,您應(yīng)該能夠推斷出哪些是中心抽頭,哪些是線圈末端,并能夠在上面的配置中連接它們。
用 LabJack 控制步進(jìn)電機(jī)
要控制步進(jìn)電機(jī),數(shù)字 I/O 線路狀態(tài)需要以特定模式從上述驅(qū)動模式之一高速切換。雖然這些波形可以通過直接從計(jì)算機(jī)設(shè)置 I/O 線來創(chuàng)建,但利用 LabJack 的 Lua 腳本功能并創(chuàng)建混合應(yīng)用程序更有效,其中一些邏輯在主機(jī)上并具有步進(jìn)電機(jī)控制代碼直接在 T 系列設(shè)備上執(zhí)行。以下功能框圖概述了如何使用 LabJack 控制步進(jìn)電機(jī):
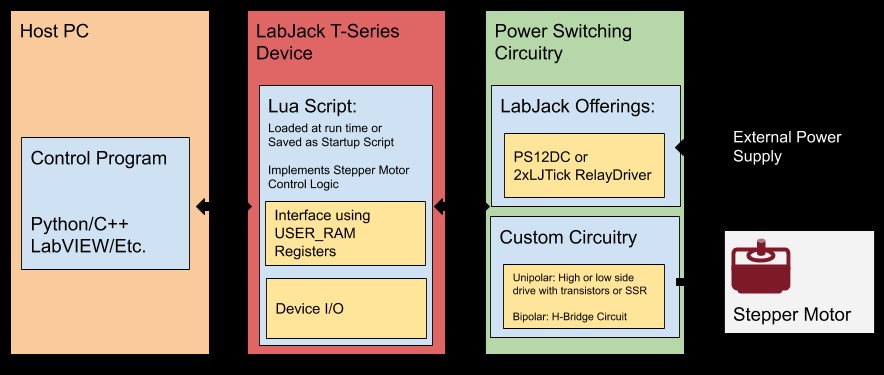
在較高層次上了解需要完成的工作后,可以遵循以下基本工作流程:連接到設(shè)備、配置設(shè)備和控制設(shè)備。
連接到 LabJack
大多數(shù) LabJack 應(yīng)用程序的第一步是使用 LJM 庫打開到設(shè)備的連接。這是利用 LJM_Open 函數(shù)完成的,該函數(shù)可以傳遞設(shè)備類型、表示設(shè)備序列號或 IP 地址的標(biāo)識符以及打開特定設(shè)備的連接類型。打開函數(shù)也可以用 LJM_Open(LJM_dtANY, LJM_ctANY, LJM_idANY,...) 調(diào)用,它將打開任何連接的設(shè)備。打開與設(shè)備的連接后,open 函數(shù)將返回一個(gè)句柄,然后可使用該句柄為應(yīng)用程序主體讀取或?qū)懭?LabJack 設(shè)備。應(yīng)用程序主體完成后,最好使用該 LJM_Close函數(shù)關(guān)閉與設(shè)備的連接。有關(guān)連接到 LabJack 設(shè)備的更多信息。
為步進(jìn)電機(jī)控制配置 LabJack
要將 LabJack 配置為單極步進(jìn)電機(jī)控制器,首先將 LUA 腳本 unipolar_full_step.lua 或 unipolar_half_step.lua(源代碼可在我們網(wǎng)站的Lua 腳本示例部分找到)加載并運(yùn)行到 LabJack 上并保存腳本作為開機(jī)默認(rèn)值。有關(guān)將 LUA 腳本加載和保存到 LabJack 的指南,請參閱獨(dú)立 Lua 腳本教程。腳本也可以通過外部程序加載,如此處的 python 示例所示以及下面討論的 LabVIEW 示例。這些 lua 腳本從上面的連接指南中聲明 FIO 通道,然后定義數(shù)組來標(biāo)識線圈端引線應(yīng)通電的順序,以便在全步或半步模式下成功地將電機(jī)移動所需的步數(shù)。然后,LUA 腳本聲明了以下 USER_RAM 寄存器,可以通過外部程序修改這些寄存器以控制電機(jī):
USER_RAM1_I32( 46080): 目標(biāo)位置(步數(shù))
USER_RAM2_I32( 46082): 當(dāng)前位置(步數(shù))
USER_RAM0_U16( 46180):啟用(1 = 啟用,0 = 禁用)
USER_RAM1_U16( 46181): 急停(1 = 急停,0 = 運(yùn)行)
USER_RAM2_U16( 46182): 保持位置(1 = 鎖定電機(jī)位置,0 = 當(dāng)前移動后釋放電機(jī))
USER_RAM3_U16( 46183): 設(shè)置主頁(1 = 將當(dāng)前位置設(shè)置為 0 步位置) 了解基本腳本后,可以開發(fā)高級腳本,實(shí)現(xiàn)更高級的應(yīng)用,例如:
使用旋轉(zhuǎn)電機(jī)時(shí),可以按度數(shù)跟蹤位置。
如果步進(jìn)電機(jī)控制線性滑塊,則可以通過距離跟蹤位置。
在一個(gè)方向上全速移動電機(jī)。
將步進(jìn)電機(jī)連接到 T 系列 LabJack數(shù)據(jù)采集卡的方法
設(shè)備
要使用 LabJack 成功連接和操作步進(jìn)電機(jī),您需要以下材料:
帶 USB、以太網(wǎng)或 WiFi 的計(jì)算機(jī)
LabJack T4 或 T7
PS12DC - 電源開關(guān)板
單極步進(jìn)電機(jī)
PS12DC 每通道可處理高達(dá) 28V 的 750mA 電流,因此大多數(shù) NEMA17 單極步進(jìn)電機(jī)都可以工作。始終使用 PS12DC 數(shù)據(jù)表驗(yàn)證電機(jī)額定值。
雙極電機(jī)將無法工作,因?yàn)樗鼈冃枰?2 組 H 橋,而 PS12DC 只是一個(gè)高側(cè)開關(guān)器件,因?yàn)樗褂?P 溝道 MOSFET。
電源
這里我們將使用 12VDC,但任何不超過 PS12DC 額定值的都可以
連接線
基本連接
首先按照PS12DC 數(shù)據(jù)表中的說明將 PS12DC 連接到您的 LabJack 。如上所述,一個(gè)普通的兩相單極步進(jìn)電機(jī)應(yīng)該總共有六個(gè)引線,每個(gè)相位有兩個(gè)線圈端和中心抽頭。將其中一相的兩個(gè)線圈端連接到 PS12DC 上的 S0 和 S1,并將線圈的中心抽頭連接到 GND1。同理,將另一相的兩個(gè)線圈端接S2、S3,接第二相的中心抽頭GND2。然后,將 VS1 連接到 VS2,將 GND1 連接到 GND2。最后,VS1接12V電源正極,GND1接12V電源負(fù)極。
筆記:可以使用位于 PS12DC 同一塊中的任何一對 S 通道并具有相同的操作。默認(rèn)的 LUA 腳本 unipolar_full_step.lua 和 unipolar_half_step.lua 使用 S0+S1 和 S4+S5 作為 I/O 通道,所以在加載和使用它之前確保用您的應(yīng)用程序特定的 S 通道更新 LUA 腳本。
PS12DC 的每個(gè) S 通道對應(yīng)一條 LabJack 數(shù)字 I/O 線。通過將給定 S 通道的相應(yīng) I/O 線設(shè)置為高電平,來自電源的 12V 將被引導(dǎo)通過該 S 通道。因此,用戶可以通過簡單的 I/O 線路切換,以編程方式選擇何時(shí)為每個(gè)線圈端完全通電。S0:S7 對應(yīng) EIO0:EIO7,S8:S11 對應(yīng) CIO0:CIO3。
電源開關(guān)換向電路的另一個(gè)選擇是我們的LJTick-RelayDriver。LJTRD 可以插入 LabJack,其 INA/INB 端子連接到任何數(shù)字 I/O 線路,如LJTick-Relay Driver Datasheet中所示。然后,電源的電源和地可以連接到LJTRD的VR和GNDR端。現(xiàn)在,與 PS12DC 類似,數(shù)字 I/O 線可以設(shè)置為高電平以關(guān)閉 LJTRD 內(nèi)的固態(tài)開關(guān),并將電源電壓引導(dǎo)至相應(yīng)的 RA/RB 端子。如果相位的線圈端連接到這些 RA 和 RB 端子,LJTRD 將允許用戶決定何時(shí)為每個(gè)相位完全通電。也可以使用具有類似功能和額定值的任何其他固態(tài)繼電器或晶體管。
識別線索
萬用表可用于將每相的引線識別為線圈端或中心抽頭。一種方法是測量不同導(dǎo)線對之間的電阻。兩個(gè)線圈端引線之間的電阻應(yīng)是線圈端引線與中心抽頭引線之間電阻的兩倍。通過測試幾對引線之間的電阻,您應(yīng)該能夠推斷出哪些是中心抽頭,哪些是線圈末端,并能夠在上面的配置中連接它們。
用 LabJack 控制步進(jìn)電機(jī)
要控制步進(jìn)電機(jī),數(shù)字 I/O 線路狀態(tài)需要以特定模式從上述驅(qū)動模式之一高速切換。雖然這些波形可以通過直接從計(jì)算機(jī)設(shè)置 I/O 線來創(chuàng)建,但利用 LabJack 的 Lua 腳本功能并創(chuàng)建混合應(yīng)用程序更有效,其中一些邏輯在主機(jī)上并具有步進(jìn)電機(jī)控制代碼直接在 T 系列設(shè)備上執(zhí)行。以下功能框圖概述了如何使用 LabJack 控制步進(jìn)電機(jī):
在較高層次上了解需要完成的工作后,可以遵循以下基本工作流程:連接到設(shè)備、配置設(shè)備和控制設(shè)備。
連接到 LabJack
大多數(shù) LabJack 應(yīng)用程序的第一步是使用 LJM 庫打開到設(shè)備的連接。這是利用 LJM_Open 函數(shù)完成的,該函數(shù)可以傳遞設(shè)備類型、表示設(shè)備序列號或 IP 地址的標(biāo)識符以及打開特定設(shè)備的連接類型。打開函數(shù)也可以用 LJM_Open(LJM_dtANY, LJM_ctANY, LJM_idANY,...) 調(diào)用,它將打開任何連接的設(shè)備。打開與設(shè)備的連接后,open 函數(shù)將返回一個(gè)句柄,然后可使用該句柄為應(yīng)用程序主體讀取或?qū)懭?LabJack 設(shè)備。應(yīng)用程序主體完成后,最好使用該 LJM_Close函數(shù)關(guān)閉與設(shè)備的連接。有關(guān)連接到 LabJack 設(shè)備的更多信息。
為步進(jìn)電機(jī)控制配置 LabJack
要將 LabJack 配置為單極步進(jìn)電機(jī)控制器,首先將 LUA 腳本 unipolar_full_step.lua 或 unipolar_half_step.lua(源代碼可在我們網(wǎng)站的Lua 腳本示例部分找到)加載并運(yùn)行到 LabJack 上并保存腳本作為開機(jī)默認(rèn)值。有關(guān)將 LUA 腳本加載和保存到 LabJack 的指南,請參閱獨(dú)立 Lua 腳本教程。腳本也可以通過外部程序加載,如此處的 python 示例所示以及下面討論的 LabVIEW 示例。這些 lua 腳本從上面的連接指南中聲明 FIO 通道,然后定義數(shù)組來標(biāo)識線圈端引線應(yīng)通電的順序,以便在全步或半步模式下成功地將電機(jī)移動所需的步數(shù)。然后,LUA 腳本聲明了以下 USER_RAM 寄存器,可以通過外部程序修改這些寄存器以控制電機(jī):
USER_RAM1_I32( 46080): 目標(biāo)位置(步數(shù))
USER_RAM2_I32( 46082): 當(dāng)前位置(步數(shù))
USER_RAM0_U16( 46180):啟用(1 = 啟用,0 = 禁用)
USER_RAM1_U16( 46181): 急停(1 = 急停,0 = 運(yùn)行)
USER_RAM2_U16( 46182): 保持位置(1 = 鎖定電機(jī)位置,0 = 當(dāng)前移動后釋放電機(jī))
USER_RAM3_U16( 46183): 設(shè)置主頁(1 = 將當(dāng)前位置設(shè)置為 0 步位置) 了解基本腳本后,可以開發(fā)高級腳本,實(shí)現(xiàn)更高級的應(yīng)用,例如:
使用旋轉(zhuǎn)電機(jī)時(shí),可以按度數(shù)跟蹤位置。
如果步進(jìn)電機(jī)控制線性滑塊,則可以通過距離跟蹤位置。
在一個(gè)方向上全速移動電機(jī)。
北京迪陽世紀(jì)科技有限公司提供全系列產(chǎn)品 請看官網(wǎng):www.dhqcn.com
北京迪陽世紀(jì)科技有限責(zé)任公司 版權(quán)所有 ? 2008 - 2018 著作權(quán)聲明
010-62156134 62169728 13301007825 節(jié)假日:13901042484 微信號:sun62169728
地址:北京市西城阜外百萬莊扣鐘北里7號公寓
E_mail:[email protected] 傳真: 010-68328400
京ICP備17023194號-1 公備110108007750
010-62156134 62169728 13301007825 節(jié)假日:13901042484 微信號:sun62169728
地址:北京市西城阜外百萬莊扣鐘北里7號公寓
E_mail:[email protected] 傳真: 010-68328400
京ICP備17023194號-1 公備110108007750